成果事例
ビンピッキングロボット用3D部品検出システムの開発
Information

株式会社ウチゲン

静岡大学工学部
- 実施期間
- 2020年5月~2021年1月
- 申請企業
- 株式会社ウチゲン 田村 哲士
- プロジェクトリーダー
- 伊藤 友孝:静岡大学 学術院工学領域 機械工学系列 准教授
- スカウト
- 髙橋 一樹:静岡大学 イノベーション社会連携推進機構 産学連携推進部門 客員教授
- ビジネス財務コーチ
- 長島 悠人:静岡銀行
- インタビュー動画
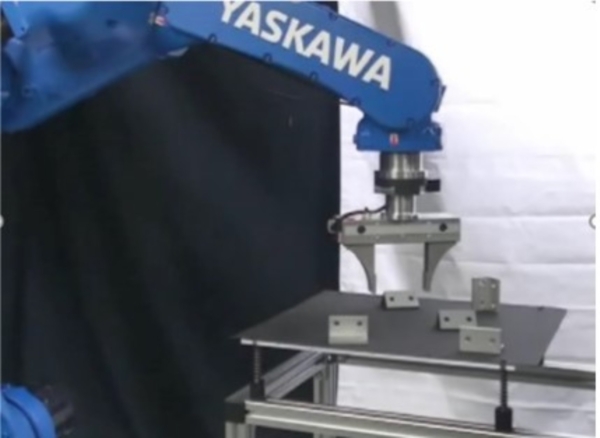
中小企業向けのバラ積み部品のピッキングロボットを安価に実現する手段として、単眼カメラの画像から対象物の3D位置・姿勢情報を高速かつ高精度で抽出するための視覚認識の基礎技術を確立し、目標とする検出精度と検出時間を達成した。
- 課題
- 人手不足が深刻な状況下、バラ積み部品のピッキングロボットのニーズは多い。しかし高額な設備投資が難しい中小企業において、人手による単純作業が強いられているケースは少なくない。コストがかる部品検出部を安価で実現することを考えたが、その要となる高度な視覚認識の知見がなくA-SAPに依頼した。
- プロジェクト概要
- 単眼カメラの画像から把持対象物の3D位置・姿勢情報を高速かつ高精度で抽出するための視覚認識の機能を、AI(ディープラーニング)と数値モデルを併用して実現する方式を研究、試作した。そしてロボットを用いたピッキングの実証実験を実施し、目標とした検出精度と検出時間を達成したことを確認できた。さらに安価なRGB-Dカメラを付加して得られた深度情報を統合し、数値モデルで検出された部品に対応する三次元の点群を得ることができるようになった。
- 期待される効果
- 本プロジェクトの成果である安価な単眼カメラによるビンピッキングの基礎技術をもとに、低コストで顧客価値が高い自社商品の開発を進めていく。そのためにプロジェクトリーダーとの共同研究を今後も継続する。
- 関連した光技術
- カメラ、画像処理、画像解析、AI