成果事例
画像処理技術を活用したAGV位置検知の精度向上
Information

矢崎化工株式会社

静岡大学工学部
- 実施期間
- 2020年5月~2021年1月
- 申請企業
- 矢崎化工株式会社 鶴田 裕樹
- プロジェクトリーダー
- 橋本 岳:静岡大学 学術院工学領域 電気電子工学系列 准教授
- スカウト
- 鈴木 俊充:静岡大学 イノベーション社会連携推進機構 産学連携推進部門 特任教授
- ビジネス財務コーチ
- 黒田 貴之:静岡銀行
- インタビュー動画
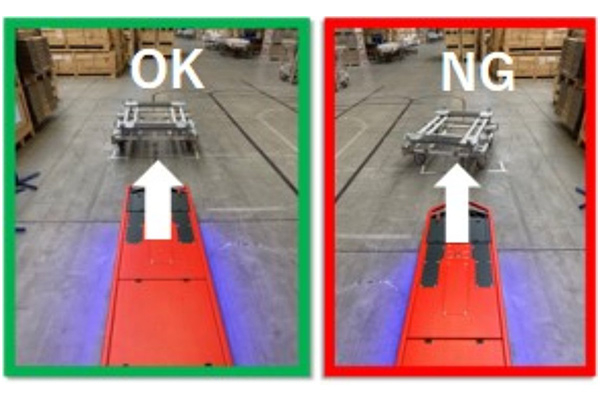
指定された枠から位置や方向がずれて置かれた台車に対し、それを牽引するAGVが潜り込むポイントの位置検知を行う画像処理アルゴリズムを開発した。その結果目標とした位置ずれにおいても台車を誘導できることを確認した。
- 課題
- AGV業界において自律走行の需要が高まり、2D-LiDAR SLAM技術を利用したAGVの開発に着手している。しかし指定された枠から位置や方向がずれて置かれた台車には対応できない場合がある。これを解決するためには画像処理技術を付加する必要があると思われ、その知見が得られるようA-SAPに依頼した。
- プロジェクト概要
- AGVが搬送する台車の位置を正しく計測するために、カメラの選定やAGVへの取り付け位置などを検討し、計測装置を試作した。模擬環境において実証実験、そして実際のAGVに搭載して走行試験を行い、AGVが潜り込むポイントの位置検知を行う画像処理アルゴリズムの開発を行った。その結果、台車の位置や方向を計測し、さらに角度がずれている台車に対しても誘導可能であることを確認した。
- 期待される効果
- この知見を活かし、製品化に向けたプロジェクトを結成する。このようなAGVに対するニーズの多い地域では、すでに販売しているAGVのオプション品として販売を開始する。
- 関連した光技術
- カメラ、画像処理、画像解析